


先進運転支援システム(ADAS)は、自動車に搭載された各種センサー(ミリ波レーダー、レーザーレーダー、単眼/双眼カメラなど)を用いて、運転中のあらゆる場面で周囲の状況を感知します。そして、データを収集し、静的および動的物体を識別、視覚・追跡し、ナビゲーションマップデータと組み合わせて体系的に計算・分析します。これにより、ドライバーは潜在的な危険を事前に認識することができ、運転の快適性と安全性を効果的に高めることができます。
ADAS システム全体は、認識層、意思決定層、実行層に分けられます。
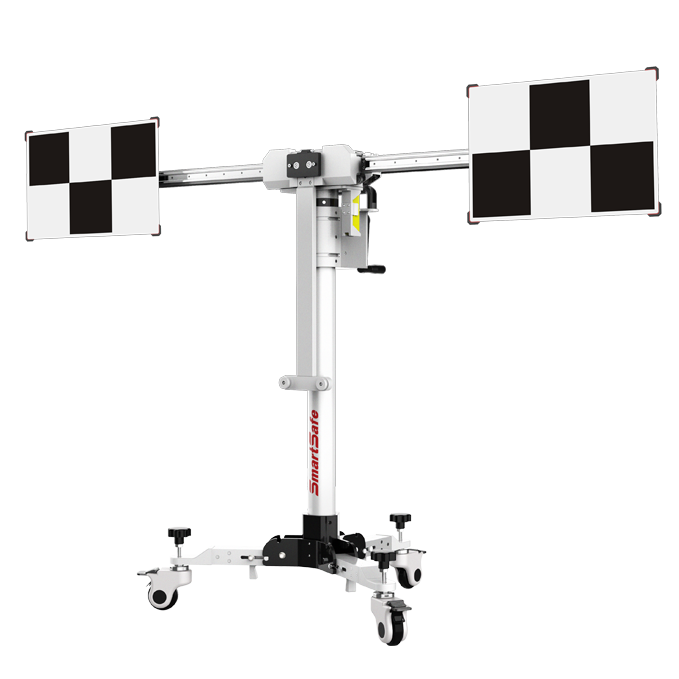
① 認知層は、レーダーセンサー(ミリ波、超音波、レーザーレーダー)、視覚センサー(単眼・双眼カメラ、赤外線熱画像センサー)、高精度地図などで構成され、これらのセンサーを通じて自動車の運転中の環境を識別します。
② 意思決定層では、チップはアルゴリズムを通じてインタラクティブな意思決定、経路計画、および出力実行指示を実現します。
③実行層では、意思決定を通じて、自動車の電力変換、ブレーキ、ステアリング、照明効果などの機能を実現します。
消費者が自動車のアクティブセーフティ機能にますます関心を寄せているためです。以前は高級車にしか搭載されていなかったADAS(先進運転支援システム)は、徐々に多くの車の基本装備となりつつあります。ADASシステム搭載車が増えるにつれて、以下の状況では、車両のADASキャリブレーションを行う必要があります。
① 事故の修復後、関連する補助システムの調整を行う必要がある。
②カメラ、レーダー、センサーなどの監視部品を分解または再取り付けしたり、車両ECUを交換したり、車高を変更したりする場合には、補助システムやその他のシステムのキャリブレーションも必要です。
一般的な ADAS システムは次のとおりです。
ACC: アダプティブクルーズコントロール
車両が走行している間、車両の前部に設置された車間距離センサーが車両の前方の道路を継続的にスキャンし、車輪速センサーが車速信号を収集します。
FCW: 前方衝突警告
LDW: 車線逸脱警報
車線逸脱警報システムは、主にHUDヘッドアップディスプレイ、カメラ、コントローラー、センサーで構成されています。車線逸脱警報システムが作動すると、カメラは常に走行車線の区画線を収集します。画像処理により、現在の車線における車両の位置パラメータを取得します。車両が車線から逸脱したことが検出されると、センサーは車両データとドライバーの操作状況をタイムリーに収集し、コントローラーは警告信号を発します。このプロセス全体は約0.5秒で完了し、ドライバーにより多くの反応時間を提供します。また、ドライバーが方向指示器を点灯して正常に車線変更した場合、車線逸脱警報システムは何も指示しません。
DMS: ドライバーモニタリングシステム
DMSカメラで取得した画像に基づき、視覚追跡、目標検出、行動認識などの技術を用いて、運転者の運転行動と生理状態を検知します。運転者が疲労、注意散漫、通話、喫煙、シートベルト未着用などの危険な状況にある場合、システムは設定時間内に警報を発し、事故を回避します。DMSシステムは、運転者の運転行動を効果的に制御し、交通事故の発生確率を大幅に低減します。
米国自動車技術協会(SAE)と米国道路交通安全局(NHTSA)が導入した分類基準に基づき、5つのレベルに分けられています。
マニュアル運転
市場に出回っている車のほとんどは、依然として手動で運転されています。人間がダイナミックな運転操作を行いますが、ドライバーを支援するシステムは存在します。しかし、技術的に言えば、これらの支援システムは車両を積極的に「運転」するわけではないため、自動運転ではありません。
車両には加速や減速などの個別の運転支援システムが搭載されており、その他の運転操作はすべて人間のドライバーが行います。これは自動運転の最も低いレベルです。
レベル2:部分自動運転
この車両には複数の運転支援システムが搭載されており、車両がステアリングホイール、加減速を制御し、その他の運転操作はドライバーが行います。
レベル3:条件付き自動運転
この車両には「環境を検知」する機能を備えた運転支援システムが搭載されており、その情報に基づいて判断を下すことができます。しかし、このレベルでは依然として人間のドライバーによる操作が必要です。
レベル4:高度自動運転
限られた道路状況や環境下では、ほとんどの場合、人間の介入は必要ありません。ただし、ドライバーは手動で制御することもできます。
レベル5:完全自動運転
自動運転システムは、人間の介入なしにすべての運転操作を実行します。あらゆる場所へ行き、経験豊富な人間のドライバーにしかできないことを行うことができます。あらゆる道路や環境条件下で走行します。
Return























 VIEW All
VIEW All