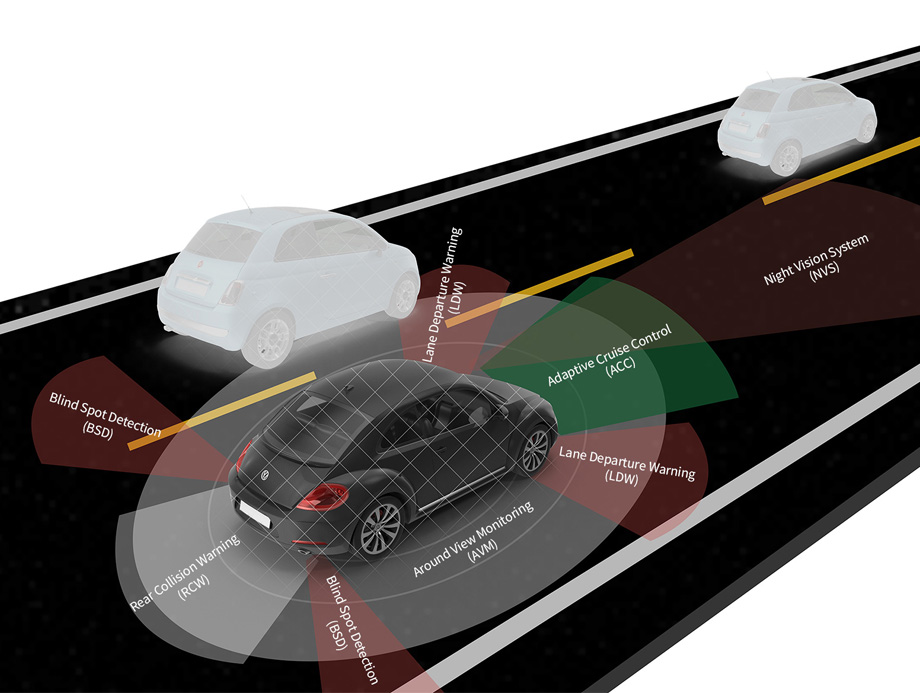
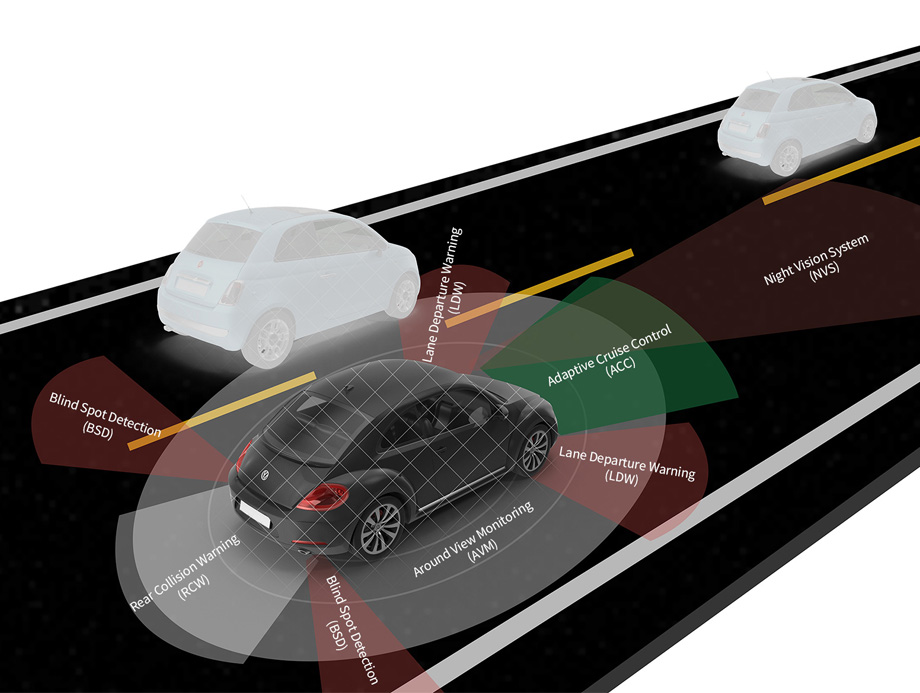
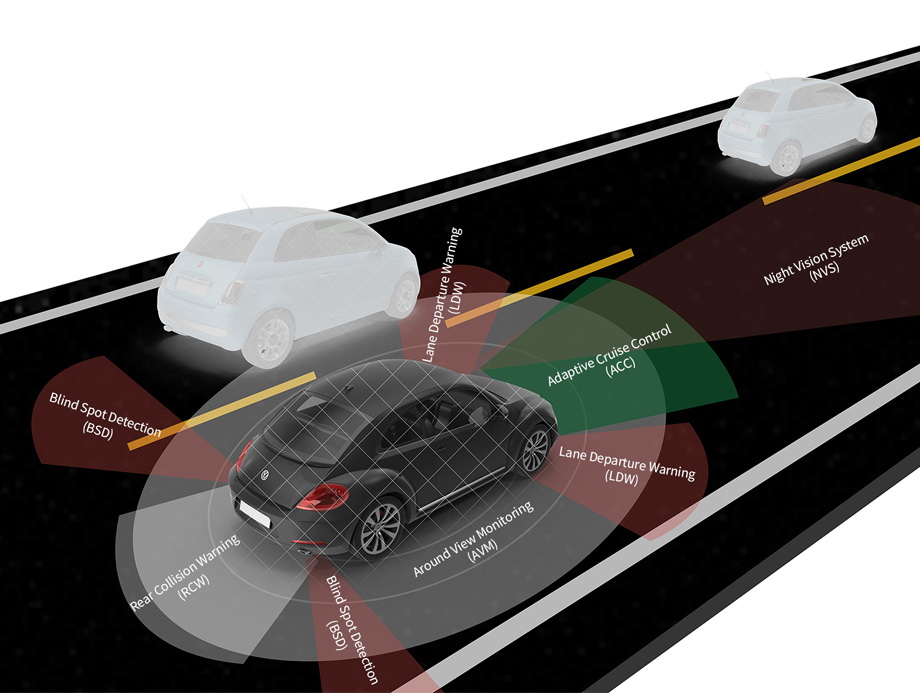
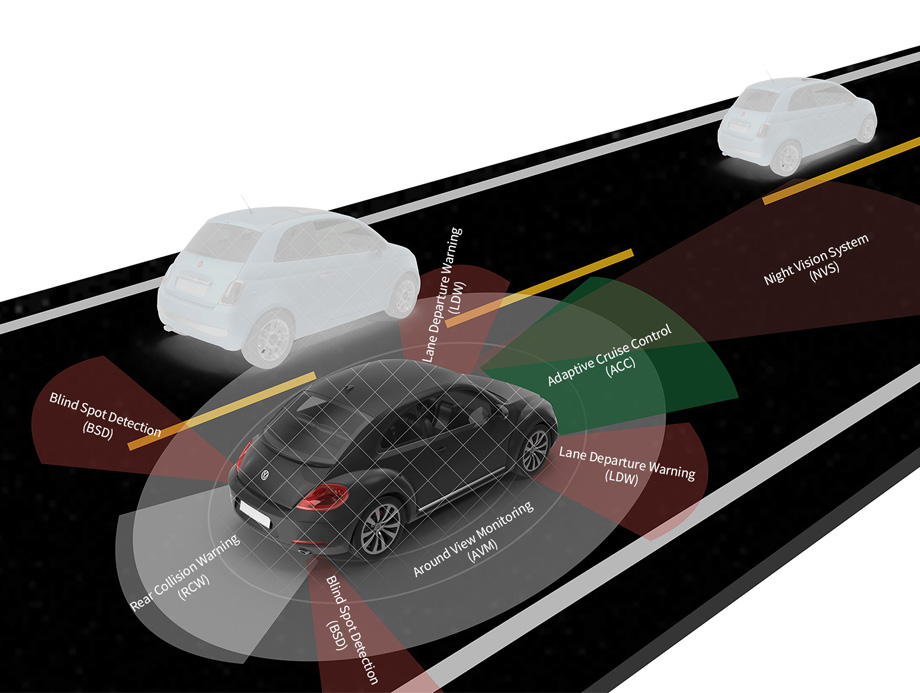
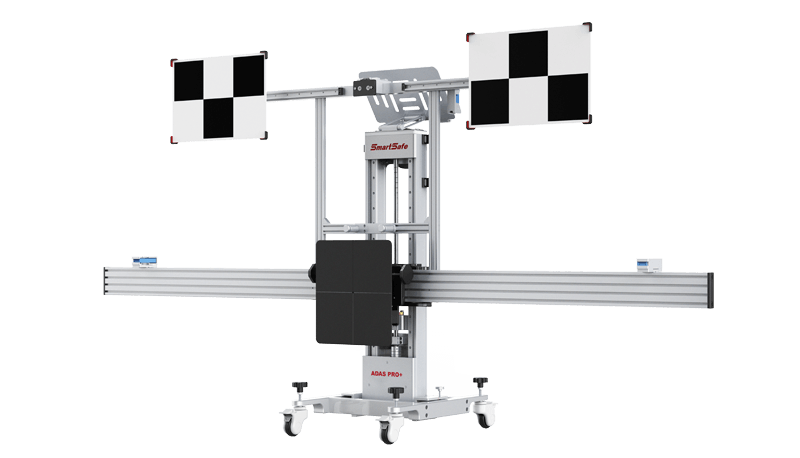
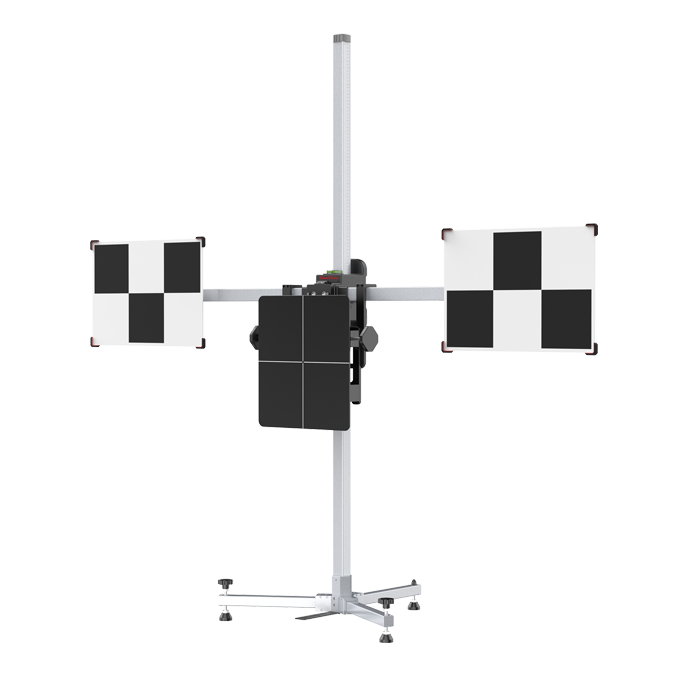
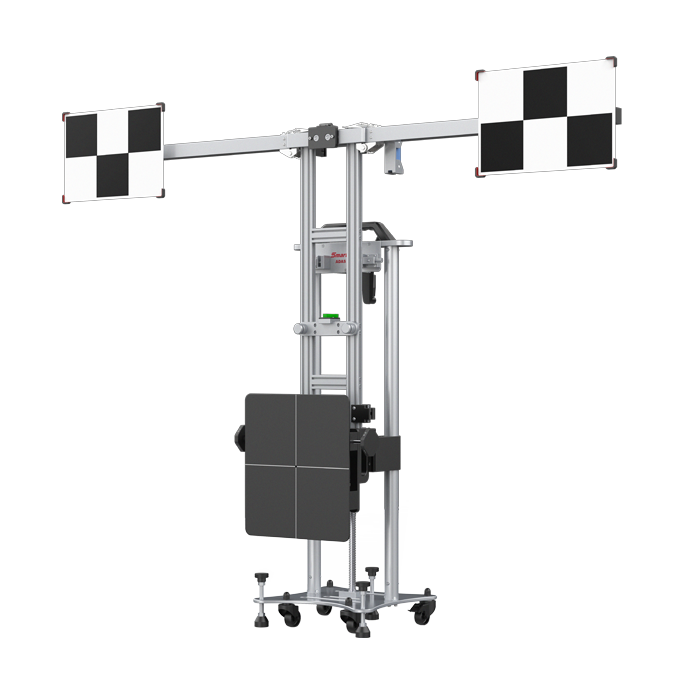
ADAS Calibration Equipment, the classic flagship product of SmartSafe, is exclusively intended for use on vehicles. It enables you to effectively and accurately calibrate various types of camera and radar driving assistance systems.
Why Use ADAS Calibration Tools: Repair or replace sensor control unit (replace ACC radar, front camera sensor). Sensor deflection angle is out of normal range (incorrect mounting position angle).Move the position of the sensor on the Car body (the sensor position changes). Repair or replace the parts that hold the front sensor (replace bumper, front windshield). Adjust the chassis.

Learn more
Learn more
Learn more
Learn more
Learn more
Learn more
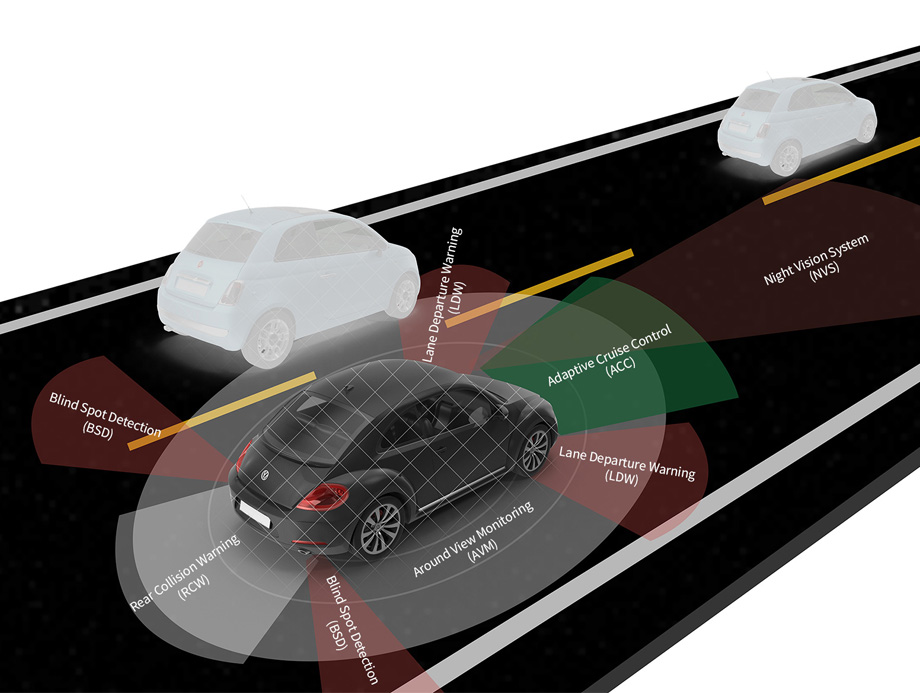
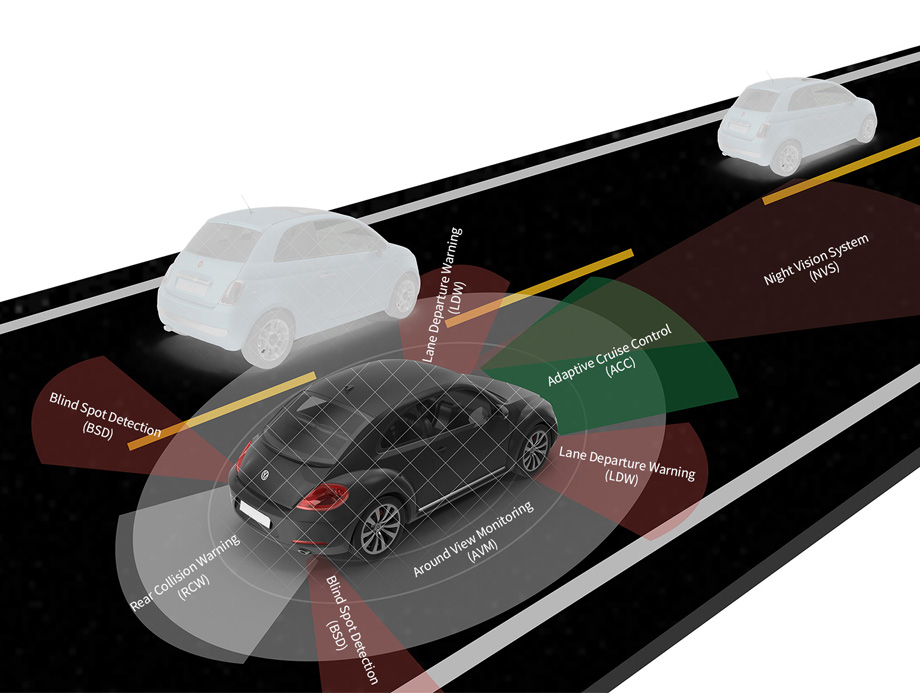
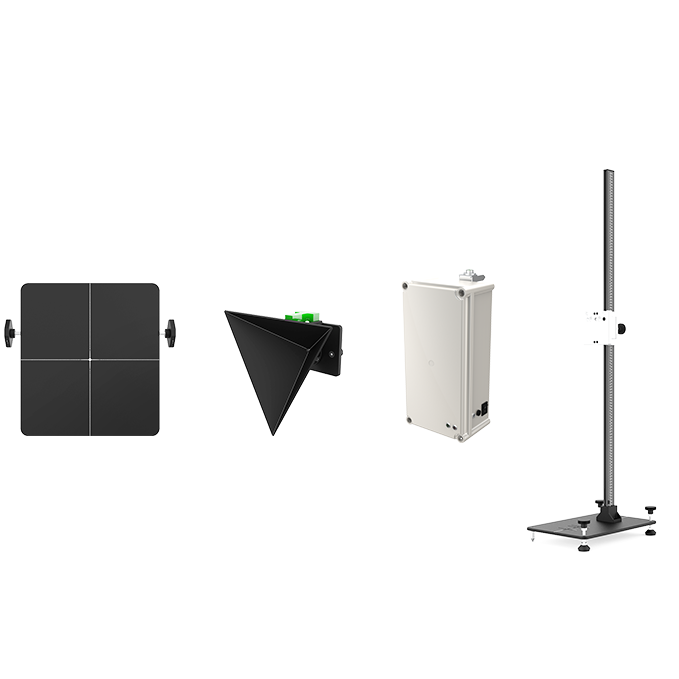
ADAS stands for Advanced Driver Assistance Systems. These are technologies designed to help drivers in operating their vehicles safely and efficiently. With ADAS solutions from SmartSafe ADAS tools, your shop can establish its own calibration center, giving you the advantage of performing calibrations in-house. Ensure ADAS systems in your customer vehicles perform as expected and provide significant financial benefits.
We provide the necessary ADAS equipment and assist our customers in setting up facilities, training staff, implementing quality control measures and providing ongoing support.